DC Series Motor Working Principle, Characteristics
There are many types of DC motors, such as Shunt motors, Series motors, and Compound motors. In this article, you will learn about the DC series motor in detail. This motor is known to produce high torque. It is usually used in applications where heavy loads are involved, such as electric trains, cranes, and elevators.
What is DC Series Motor
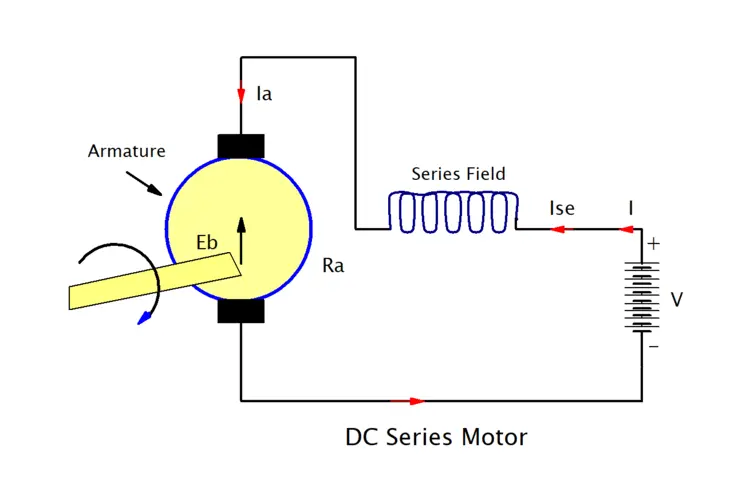
A series dc motor is an electromechanical machine that converts electrical energy into mechanical energy. The series dc excited motor runs on a direct current (DC), in which the field winding and armature winding are connected in series. When voltage is applied to this motor, the same current flows in its field winding and armature winding.
DC Series Motor Construction
To completely understand the working principle of this motor it is important to know its components. Major components of series dc motor:
- Stator: The stator is the stationary part of this motor, which is used to generate the magnetic field. It uses either electromagnets or permanent magnets, which are the external part of the motor.
- Armature: It is the rotating part that rotates inside the magnetic field of the stator. When electric current flows through the armature, it rotates due to the effect of the magnetic force according to Fleming’s left-hand rule.
- Commutator: The device required to ensure that the armature always rotates in one direction is called a commutator. It is a rotating contact system that changes the direction of the electric current at the right time and ensures that the speed of the armature remains constant.
- Brushes: Brushes pass electric current through the commutator to the armature.
DC Series Motor Working Principle
A series dc motor works on Fleming’s left-hand rule. This rule states that when a current-carrying electrical conductor is placed in a magnetic field, a mechanical force is applied on the conductor.
Step by Step Process DC Series Motor Working.
Step 1:
- When a DC supply is given to the motor, current flows in the field winding.
- The field current produces a powerful magnetic field in the stator.
- The magnetic flux line of the generated magnetic field flows from the north pole of the field pole towards the south pole.
Step 2:
- The same current also flows in the armature winding.
- The force produced on the armature conductors in a magnetic field is.
- This force is given by the equation F = BIL, where B = magnetic flux density, I = current, and L = length of the conductor.
Step 3:
- The forces acting on the conductors located in different slots of the armature together produce torque.
- This torque rotates the armature.
- The value of torque is given by T = K × Φ × Ia, where K = constant, Φ = magnetic flux, and Ia = armature current.
Step 4:
- The commutator and brush device continuously change the direction of current in the armature.
- Due to this, the torque always remains in the same direction, and the armature continues to rotate.
Speed Control of DC Series Motor
Speed control of series dc motor is highly required in modern industrial applications. From electric trains to industrial machines, accurate speed control is needed everywhere. Many methods are used for its speed control.
- Field Control Method: This method is based on controlling the speed of the motor by changing the field flux.
- Armature Resistance Control Method: Variable resistance is added to the armature circuit. It is traditional and widely used.
- Voltage Control Method: In this, the speed of the motor changes by changing the voltage. It is considered to be the most effective method in the modern era.
- Parallel Control Method: In this, two or more series motors are connected in parallel. It is used in certain situations.
- Frequency Control Method: In this, an AC supply is used. Later, the DC motor is run by converting it into a DC supply through a rectifier.
Characteristics of DC Series Motor
The performance of a DC series wound motor is determined by its characteristics. The characteristics of a DC series motor help in understanding both its functioning and behaviour, which ultimately determine its performance. DC series excited motors have both field and armature windings connected in series with their power source, thus drawing full armature current under load – producing a speed versus armature current curve similar to magnetic saturation, which resembles a rectangular hyperbola.
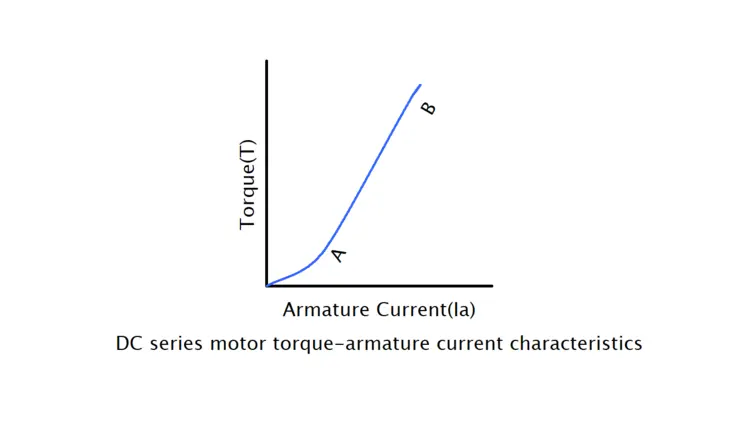
Torque Armature Current Characteristic of DC Series Motor
It gives the relation between motor torque and armature current, the torque T being directly proportional to the square of armature current Ia2. DC Series wound Motor offer the advantage of producing ample torque with minimal armature current, making them suitable for applications requiring high starting torque. Due to low voltage drop and its speed-armature current characteristics being rectangular hyperbolas, series motors provide ample starting torque at low cost.
This type of motor generates a strong magnetic field to generate torque, with its speed being directly proportional to both back EMF and magnetic flux (Ph). This characteristic makes self-regulation easy.
Torque-armature current curves are generally parabolic until magnetic saturation; thereafter, they become straight lines (portion AB of the curve).
Once magnetic saturation occurs, armature current Ia has a direct influence on speed; hence, their relationship is linear. Thus, a Series wound Motor can easily be controlled using external circuitry that creates variable resistance that alters current flowing through its armature; solid-state speed controls using thyristors and transistors provide more precise and automated current control that enables the motor to produce desired levels of speed.
Speed Armature Current Characteristic of DC Series Motor
It gives the relation between motor speed and armature current, which says that when armature current changes, its speed also changes. DC Series Motors have their field windings coupled in series with the armature current; thus, the armature current also acts as field current. Therefore, magnetic flux linking field coils is proportional to armature current up until saturation; hence, their torque-armature current curve looks like a parabola until magnetic saturation occurs, after which point it shifts to a straight line (portion AB of the curve).
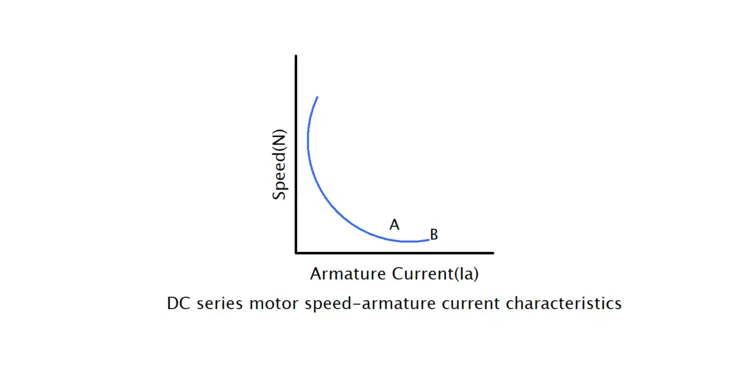
Load increases cause the speed to decrease as more current flows through the field winding, while when load decreases, the speed begins to climb sharply due to reduced current passing through it and subsequent flux production being lower than before.
So if a motor is run at no or light load, its shaft torque will drop significantly, leading to high speeds that could potentially damage its rotor. As such, series motors should never be started at no or light load; for larger starting torque needs, the armature current can be increased linearly in order to increase shaft torque linearly. These types of DC Motors are perfect for applications where starting torque requirements are moderate; our Electrical MCQs offer more information.
Speed Torque Characteristic of DC Series Motor
It tells the relation between motor speed and torque, which is also called the mechanical characteristic. In this, speed decreases as torque increases. Speed-torque characteristics (STCDs) of Series dc excited motors are an integral part of selecting a suitable DC motor for an application. This parameter must be carefully considered when making this selection decision.
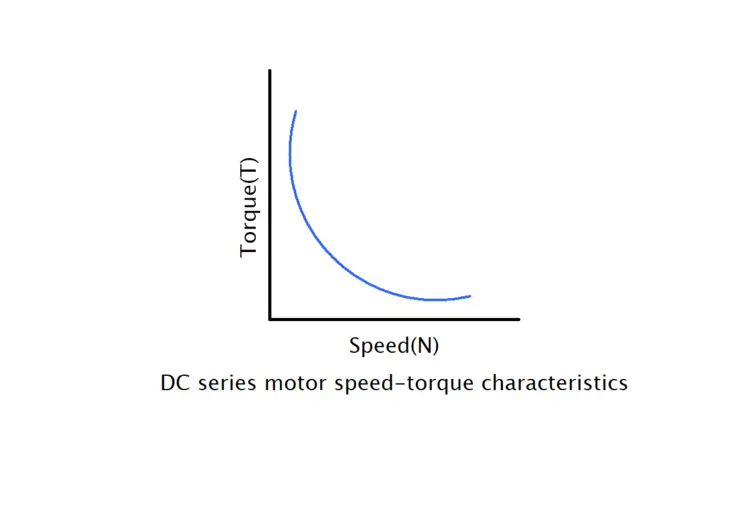
A speed torque characteristic of a Series wound motor shows how quickly shaft speed increases as load torque does, as well as its behaviour after mechanical load is taken away. In this transient period, acceleration occurs when electromagnetic torque Tem exceeds frictional losses (Tfric), and deceleration takes place when one is less than the other and releases previously stored inertial energy.
Since the field and armature windings of a series DC motor are connected, its entire armature current passes through both to produce sufficient magnetic flux. Until magnetic saturation, there is a direct relationship between current and torque, with the corresponding curve having a parabolic shape.
Advantages of DC Series Motor
- The starting torque of the DC series excited motor is very high, which makes it suitable for heavy load applications.
- The design and construction of the series wound dc motor is remarkably simple, which not only facilitates its operation but also makes it easy to maintain and repair.
- The cost of a DC series excited motor is budget-friendly.
- This motor performs very well under overload conditions because its torque increases with load.
- The speed of the high torque DC motor can be easily controlled, which makes it flexible.
- The small size of this motor makes it worthwhile in limited spaces.
- A DC series excited motor does not require external starting because its starting torque is very high, and it starts automatically.
- Series wound dc motors pose fewer complications, especially in applications where continuous operation of the motor is required.
Limitations of a DC Series Motor
- The speed of a traction motor decreases with load. As the load increases, the speed of the motor also decreases, which in some cases causes speed instability.
- When the load on the motor increases, its armature current also increases, which increases the risk of the motor overheating. Overheating affects the efficiency and life of the motor.
- It is challenging to fine-tune the speed of a series dc motor. The increase or decrease in load causes sudden speed changes, which are unsuitable for exact speed control requirements.
- This motor is not suitable for constant speed because its speed varies with the load.
- Running a excited traction series motor at high voltage becomes risky and may cause damage to other parts of the motor.
- The efficiency of a DC series motor decreases at low load. When the load is very low, the motor requires more current, making it less efficient.
- There is a problem in starting at a low load. If the load is very low, the motor has trouble starting properly, which can cause starting problems.
Application of DC Series Motor
- The DC series excited motor is most commonly used in traction systems, such as electric trains, trolleys, and tramcars, because it has high starting torque.
- This motor is widely used in cranes, elevators, and lifts because lifting such heavy loads requires high starting torque, which is provided by this DC series wound motor.
- DC high torque series motors are also used in conveyor belts and other material handling systems where the motor needs to start quickly with heavy loads.
- This motor is also used in rolling mills, where the motor requires high torque to handle high loads and speed changes.
- DC series excited motors are used in winches, which are suitable for pulling or lifting heavy loads.
- Series dc motors are also used in electric vehicles (EVs) such as electric rickshaws and electric forklifts, where the motor requires high torque as the speed varies with the load.
- Series motors are used in portable power tools such as drills and saws, where the motor requires a high starting torque.
- Series dc excited motors are also used in metro trains and subway systems because they have high starting torque, which helps in giving initial speed to the trains.
Differences Between DC Series and Shunt Motor
| DC Series Motor | DC Shunt Motor |
| Its field winding and armature winding are connected in series. | The field winding and armature winding of this motor are connected in parallel. |
| Its starting torque is very high. | The starting torque of dc shunt motor is low. |
| The speed-load characteristic of a DC series excited motor is inverse. | |
| The speed regulation of this motor is poor. | Its speed regulation is good, |
| This motor is used in cranes, lifts, and traction systems. | This motor is used in fans, pumps, and compressor systems. |
| The efficiency is high at heavy loads, but it decreases at light loads. | The efficiency of the shunt motor is steady, whether the load is light or heavy. |
| If the load increases too much for any reason, then there is a danger of overheating and damage to the DC series motor. | A shunt motor does not suffer much loss in overload conditions because its speed remains constant. |
Conclusion
In conclusion, the DC series motor is a vital component in various industrial and automotive applications due to its unique characteristics. Its ability to provide high starting torque makes it ideal for tasks requiring powerful force at startup, such as in cranes, elevators, and electric trains. However, it’s important to consider its limitations, such as speed control challenges and maintenance requirements. Understanding these aspects can help in selecting the right motor for specific applications and ensuring optimal performance. As technology advances, ongoing innovations in DC motor design continue to enhance their efficiency and versatility, promising even broader applications in the future.
FAQ
1. Why DC Series Motor Should be Started with Load
A series high torque dc motor should not be started without a load, as it can cause the speed to become dangerously high without one. When there is no load, the back emf Eb of the motor is low, and current Ia flows more. The speed of this motor increases uncontrollably, which may damage the motor’s parts, break the bearings, and cause the motor to be damaged entirely. Therefore, for safety, it is necessary to start on load.
2. Which DC Motor is Preferred for Elevator
Both DC shunt motors and AC gearless motors are widely used for elevators, but AC gearless motors are primarily used in modern elevators.
3. Why DC Series Motor has High Starting Torque
The starting torque of a dc high torque series motor is high because both armature current and field current are equal. When the motor starts, the field flux is maximum, and the torque is proportional to the flux and armature current product. Due to this, the starting torque is very high, which makes it useful for heavy-load applications.
4. Why DC Series Motor is used in Traction
The series motor is used for traction because of its high starting torque and speed control capability, perfect for smoothly running heavy loads. These motors work efficiently even under overload conditions, which is ideal for traction applications such as trains and trams.
5. How to Check Direction of a DC Series Motor
To check the direction of a series excited motor, you need to understand the supply polarity at the terminals of the motor. If you reverse the polarity of both the armature and field winding, the direction of the motor will remain the same. But if you reverse the polarity of only the armature or field winding, the direction of the motor will change. From nature, you can check the direction of the motor.
I am an electrical engineer and also a blogger. I write informative blog posts on topics related to electrical and electronics engineering. If you are interested in these topics, you are welcome to my site to read these articles.

